すべてのカテゴリ
-
集積回路 (ic)
集積回路 (ic)
- インタフェース - センサ、静電容量式タッチ(642)
- 専用 ic(12302)
- pmic-電圧レギュレータ-特別な目的(5644)
- pmic-電圧レギュレータ-リニアレギュレータコントローラ(793)
- pmic-電圧レギュレータ-リニア + スイッチング(1829)
- pmic-電圧レギュレータ-リニア(70981)
- pmic-電圧レギュレータ-dc dc スイッチングレギュレータ(39569)
- pmic-電圧レギュレータ-dc dc スイッチングコントローラ(13507)
- pmic-電圧リファレンス(9453)
- pmic-v/f および f/v コンバータ(145)
- pmic-サーマルマネージメント(592)
- pmic-スーパーバイザー(47946)
- pmic-rms から dc へのコンバータ(170)
- pmic-電源コントローラ、モニタ(2104)
- pmic-パワーオーバーイーサネット (poe) コントローラ(1008)
- pmic-パワーマネージメント-専門(7722)
- pmic-配電スイッチ、ロードドライバ(7706)
- pmic-pfc (力率補正)(1222)
- pmic またはコントローラ、理想的なダイオード(705)
- pmic-モータドライバ、コントローラ(4712)
- pmic-照明、バラストコントローラ(560)
- pmic-led ドライバ(7282)
- pmic-レーザードライバ(573)
- pmic-ホットスワップコントローラ(2816)
- pmic-ゲートドライバ(7083)
- pmic-フル、ハーフブリッジドライバ(1342)
- pmic-エネルギー計量(654)
- pmic-ディスプレイドライバ(1435)
- pmic-現在の規制/管理(1481)
- pmic-バッテリ管理(5553)
- pmic-バッテリチャージャ(3831)
- pmic-ac dc コンバータ、オフラインスイッチャー(4905)
- メモリコントローラ(358)
- fpga 用のメモリ構成プロムス(639)
- メモリ-電池(13)
- メモリ(65694)
- ロジック-ユニバーサルバス機能(706)
- ロジックトランスレータ、レベルシフタ(2854)
- ロジック-特殊ロジック(1870)
- ロジック信号スイッチ、マルチプレクサ、デコーダ(9420)
- ロジックシフトレジスタ(2665)
- ロジックパリティジェネレータとチェッカー(335)
- ロジック-multivibrators(831)
- ロジックラッチ(3658)
- ロジックゲートおよびインバータ-多機能、設定可能(1687)
- ロジックゲートとインバータ(16453)
- ロジックフリップフロップ(7780)
- ロジック-fifo メモリ(4240)
- ロジックカウンタ、仕切り(3456)
- ロジックコンパレータ(592)
- ロジック・バッファ、ドライバ、レシーバ、トランシーバ(17835)
- リニアビデオ処理(2909)
- リニアコンパレータ(5084)
- リニアアナログ乗算器、仕切り(263)
- リニアアンプ-ビデオアンプおよびモジュール(1905)
- リニアアンプ-特別な目的(1856)
- リニアアンプ-計測器、オペアンプ、バッファアンプ(34236)
- リニアアンプ-オーディオ(4567)
- インターフェイス-音声記録と再生(556)
- インタフェース-uart (ユニバーサル非同期レシーバトランスミッタ)(1237)
- インターフェイス-テレコム(4467)
- インターフェイスに特化した(4833)
- インタフェース信号終端(333)
- インタフェース信号バッファ、リピータ、スプリッタ(1449)
- インターフェイスシリアライザ、デシリアライザ(1480)
- インタフェース-センサ/検出器インタフェース(1524)
- インタフェースモジュール(169)
- インタフェース-モデム-ic とモジュール(407)
- インターフェイス i/o エクスパンダ(1136)
- インターフェイス-フィルタ-アクティブ(1226)
- インタフェース-エンコーダ、デコーダ、コンバータ(714)
- インタフェース-ドライバ、レシーバ、トランシーバ(20755)
- インタフェース-ダイレクトデジタル合成 (dds)(117)
- インタフェース-コントローラ(3628)
- インターフェイス-コーデック(1676)
- インタフェースアナログスイッチ、マルチプレクサ、合(12567)
- インターフェイス-アナログスイッチ-特別な目的(2533)
- 組込みシステムオンチップ (soc)(4496)
- 組込み-pld (プログラマブル・ロジック・デバイス)(971)
- 組込みマイクロプロセッサ(10083)
- 組込みマイコン-アプリケーション固有(2275)
- 組込みマイコン(99285)
- エンベデッド - マイクロコントローラ、マイクロプロセッサ、FPGAモジュール(1527)
- マイコン内蔵 fpga (フィールドプログラマブルゲートアレイ)(81)
- 組込み-fpga (フィールドプログラマブルゲートアレイ)(27747)
- 組込み dsp (ディジタル信号処理プロセッサ)(4081)
- 組込み cpld (複雑なプログラマブル・ロジック・デバイス)(5187)
- データ集録-タッチスクリーンコントローラ(1210)
- データ集録-ディジタル/アナログコンバータ (dac)(14419)
- データ集録-ディジタルポテンショメータ(6250)
- データ集録-アナログ/デジタル変換器 (adc)(17776)
- データ集録-アナログフロントエンド (afe)(787)
- データ集録-adc/dac-特別な目的(3043)
- クロック/タイミング-リアルタイムクロック(2446)
- クロック/タイミングプログラマブルタイマおよび発振器(23469)
- クロック/タイミング-ic バッテリ(4)
- クロック/タイミング-遅延ライン(1049)
- クロック/タイミングクロックジェネレータ、pll、周波数シンセサイザ(32775)
- クロック/タイミングクロックバッファ、ドライバ(4568)
- クロック/タイミング-アプリケーション固有(8652)
- オーディオ特別な目的(1564)
関連メーカー







-
ディスクリート半導体製品
ディスクリート半導体製品
- 現在の規制 - ダイオード、トランジスタ(1090)
- トランジスタ-特別な目的(226)
- トランジスタ-プログラマブルジャンクション(48)
- トランジスタ-jfet(1558)
- トランジスタ-igbt-シングル(4799)
- トランジスタ-igbt-モジュール(63420)
- トランジスタ-igbt-アレイ(26)
- トランジスタ-fet、mosfet-シングル(48330)
- トランジスタ-fet、mosfet-rf(4903)
- トランジスタ-fet、mosfet-アレイ(6641)
- トランジスタ-バイポーラ (bjt)-シングル、プリバイアス(4539)
- トランジスタ-バイポーラ (bjt)-シングル(25800)
- トランジスタ-バイポーラ (bjt)-rf(2087)
- トランジスタ-バイポーラ (bjt)-アレイ、プリバイアス(2115)
- トランジスタ-Bipolar(BJT) - 配列(2310)
- サイリスタ-アック(4044)
- サイリスタ-scr-モジュール(3967)
- サイリスタ-scr(5436)
- サイリスタ-DIACs、sidacs(319)
- パワードライバモジュール(1627)
- ダイオード-シングル(87483)
- ダイオード-定-配列(2619)
- ダイオード-可変容量 (Varicaps、クタ)(1200)
- ダイオード-rf(2753)
- ダイオード-整流器-シングル(67528)
- ダイオード-整流器-アレイ(20581)
- ダイオードブリッジ整流器(11700)
関連メーカー




-
rf/if/rfid
rf/if/rfid
- サブスクライバー識別モジュール(SIM)カード(77)
- RF循環器とアイソレーター(1742)
- rfid、rf アクセス、監視 ic(1550)
- rfid トランスポンダー、タグ(747)
- rfid リーダーモジュール(464)
- RFID評価および開発キット、ボード(30)
- rfid アンテナ(329)
- rfi および emi シールドおよび吸収材料(6444)
- rfi および emi-接点、Fingerstock およびガスケット(7497)
- rf トランスミッタ(668)
- rf トランシーバモジュール(6900)
- rf トランシーバ ic(4169)
- rf スイッチ(9276)
- rf シールド(16401)
- rf レシーバ(1998)
- rf レシーバ、トランスミッタ、およびトランシーバの完成ユニット(2763)
- rf 電力分配器/スプリッタ(1223)
- rf パワーコントローラ ic(86)
- rf 変調器(710)
- rf ミキサー(2800)
- rf その他の ic およびモジュール(3276)
- rf フロントエンド (lna + pa)(419)
- RF評価および開発キット、ボード(747)
- rf 方向性結合器(2718)
- rf プレクサ(1464)
- rf 検出器(412)
- rf 復調(249)
- rf アンテナ(12319)
- rf アンプ(19651)
- バラン(1496)
- 減衰(4852)
関連メーカー







-
オプトエレクトロニクス
オプトエレクトロニクス
- 光メカニカル(480)
- 照明器具(125)
- レーザーダイオード、レーザーモジュール - レーザー送達、レーザー繊維(345)
- Hene Laser Systems(31)
- Hene Laser Heads(27)
- バックライトを表示します(93)
- キセノン照明(387)
- タッチスクリーンオーバーレイ(453)
- パネルインジケーター、パイロットライト(75729)
- 光学-リモート蛍光体光源(269)
- 光学-リフレクター(665)
- 光学-ライトパイプ(5384)
- 光学-レンズ(4951)
- led-スペーサー、突起(2718)
- led-ランプ交換(29718)
- led-回路基板インジケータ、アレイ、ライトバー、棒グラフ(9083)
- led サーマル製品(667)
- led 照明キット(64)
- led 照明-ホワイト(37580)
- led 照明-カラー(4728)
- led 照明-穂、エンジン、モジュール(28735)
- led 表示-離散(27601)
- レーザーダイオード、モジュール(1553)
- ランプ-incandescents、ネオン(311004)
- ランプ-冷陰極蛍光 (ccfl) と uv(164)
- インバータ(7728)
- 赤外線、uv、可視エミッタ(3871)
- 光ファイバ-トランスミッタ-ドライブ回路内蔵(4085)
- 光ファイバー-トランスミッタ-ディスクリート(350)
- 光ファイバトランシーバモジュール(18758)
- 光ファイバ-スイッチ、マルチプレクサ、合(1387)
- 光ファイバレシーバ(695)
- 光ファイバー-減衰器(654)
- 素子(102)
- ディスプレイ、モニタインタフェースコントローラ(98)
- ディスプレイモジュール-真空蛍光 (vfd)(249)
- ディスプレイモジュール-led ドットマトリクスとクラスタ(865)
- ディスプレイモジュール-led キャラクタと数値(5421)
- ディスプレイモジュール-液晶、有機 el、グラフィック(4654)
- ディスプレイモジュール-lcd、oled の文字と数値(2202)
- ディスプレイベゼル、レンズ(88)
- アドレス指定、専門(458)
関連メーカー







-
センサ、トランスデューサ
センサ、トランスデューサ
- 超音波受信機、トランスミッター - 産業(115)
- 温度センサー - サーモスタット - 機械 - 工業(3103)
- 温度センサー - アナログおよびデジタル出力 - 工業(209)
- 近接センサー - 産業(13611)
- 圧力センサー、トランスデューサー - 工業(26503)
- 光学センサー-Photonics -Counters、Detectors、SPCM(単一フォトンカウントモジュール)(751)
- 光学センサー - カメラモジュール(875)
- 磁気センサー - 位置、近接、速度(モジュール) - 産業(554)
- フォースセンサー - 工業(346)
- フローセンサー - 産業(151)
- フロート、レベルセンサー - 工業(310)
- エンコーダ - 産業(4980)
- カラーセンサー - 工業(50)
- タッチセンサー(100)
- 超音波レシーバ、トランスミッタ(2421)
- 温度センサ-サーモスタット-ソリッドステート(1096)
- 温度センサー-サーモスタット-メカニカル(3397)
- 温度センサ-熱電対、温度プローブ(1921)
- 温度センサ-rtd (抵抗温度検出器)(1525)
- 温度センサ-ptc サーミスタ(2273)
- 温度センサ-ntc サーミスタ(13259)
- 温度センサ-アナログ/デジタル出力(3928)
- ひずみゲージ(1399)
- 特殊センサ(1861)
- 太陽電池(503)
- ショックセンサー(84)
- センサインタフェース-ジャンクションブロック(2519)
- センサケーブル-アセンブリ(22011)
- 近接/占有センサー - 完成したユニット(725)
- 近接センサ(2860)
- 圧力センサ、トランスデューサ(11317)
- 位置センサ-角度、リニア位置測定(6022)
- 光センサ-反射論理出力(194)
- 光センサ-反射-アナログ出力(432)
- 光センサー-トランジスタ(1027)
- 光センサ-フォトインタラプタ-スロットタイプ-トランジスタ出力(1427)
- 光センサ-フォトインタラプタ-スロットタイプ-ロジック出力(1215)
- 光センサ-光電、工業用(16763)
- 光センサ-フォトダイオード(1543)
- 光センサー-フォト検出器-リモートレシーバー(2605)
- 光センサー-フォト検出器-ロジック出力(146)
- 光センサー-フォト検出器-cds セル(74)
- 光センサ-距離測定(377)
- 光センサー-アンビエントライト、ir、uv センサ(1305)
- 多機能(558)
- モーションセンサ-振動(337)
- モーションセンサー-チルトスイッチ(67)
- モーションセンサー-光学(719)
- モーションセンサー-傾斜(175)
- モーションセンサ-イムス (慣性計測ユニット)(416)
- モーションセンサー-ジャイロスコープ(214)
- モーションセンサー-加速度計(1911)
- マグネットセンサーマッチング(119)
- マグネット-多目的(1965)
- 磁気センサ-スイッチ (ソリッドステート)(3700)
- 磁気センサ-位置、近接、速度 (モジュール)(5199)
- 磁気センサ-リニア、コンパス (ics)(1247)
- 磁気センサ-コンパス、磁場 (モジュール)(35)
- lvdt トランスデューサ (リニア可変差動トランス)(204)
- irda トランシーバモジュール(196)
- イメージセンサー、カメラ(2235)
- 湿度、湿気センサー(1425)
- ガスセンサー(1217)
- フォースセンサ(188)
- フローセンサー(550)
- フロート、レベルセンサ(1343)
- エンコーダ(6357)
- ダストセンサー(43)
- 電流トランスデューサ(3455)
- カラーセンサ(85)
- アンプ(1905)
関連メーカー







-
コネクタ、インターコネクト
コネクタ、インターコネクト
- USB、DVI、HDMIコネクタ(446)
- 固体照明コネクタ(555)
- ICSのソケット、トランジスタ(953)
- プラグ可能なコネクタ(1221)
- 太陽光発電(ソーラーパネル)コネクタ(136)
- 光ファイバーコネクタ(370)
- FFC、FPC(フラットフレキシブル)コネクタ(761)
- Dサブ、D字型コネクタ(2887)
- 同軸コネクタ(RF)(2389)
- 円形コネクタ(14162)
- ブレードタイプのパワーコネクタ(273)
- プラグとレセプタクル(2597)
- usb、dvi、hdmi コネクタ-アダプタ(572)
- USB、DVI、HDMIコネクタ(4298)
- 端子-配線から基板コネクタ(217)
- 端子-ワイヤスプライスコネクタ(4322)
- 端子-ワイヤピンコネクタ(328)
- 端子-タレットコネクタ(1273)
- 端子-専用コネクタ(2042)
- 端子-スペードコネクタ(3902)
- 端子-はんだラグコネクター(345)
- 端子ネジコネクタ(745)
- 端子-リングコネクタ(12596)
- 端子-長方形コネクタ(4747)
- 端子-クイックコネクト、クイック接続コネクタ(8514)
- 端子-pc ピン、シングルポストコネクタ(3776)
- 端子-pc ピンレセプタクル、ソケットコネクタ(5883)
- 端子-マグネットワイヤコネクタ(1653)
- 端子-ナイフコネクタ(112)
- 端子-ハウジング、ブーツ(2850)
- 端子箔コネクタ(108)
- 端子-バレル、弾丸コネクタ(1107)
- 端子-アダプタ(137)
- ターミナルストリップとタレットボード(1159)
- ターミナルジャンクションシステム(2533)
- 端子台-電線から基板へ(43615)
- ターミナルブロック-専門(3722)
- 端子台-配電(847)
- 端子台-パネルマウント(1359)
- 端子台-インタフェースモジュール(1819)
- 端子台-ヘッダ、プラグ、ソケット(119920)
- ターミナルブロック-din レール、チャンネル(9373)
- 端子台-接点(65)
- 端子台-バリアブロック(47517)
- 端子台-アダプタ(1059)
- ソリッドステートライティングコネクタ-接点(271)
- 固体照明コネクタ(1344)
- ic 用ソケット、トランジスタアダプタ(275)
- ICSのソケット、トランジスタ(22148)
- シャント、ジャンパー(907)
- 長方形のコネクター-ばねは荷を積まれた(7721)
- 長方形コネクタ-ハウジング(43023)
- 長方形コネクタ-ヘッダ、特殊ピン(6129)
- 長方形コネクタ-ヘッダ、レセプタクル、メスソケット(229601)
- 長方形コネクタ-ヘッダ、オスピン(543338)
- 長方形のコネクター-自由に掛かること、パネルの台紙(30142)
- 長方形コネクタ-接点(10681)
- 長方形コネクタ-ボード、ボードへの直接配線(2432)
- 長方形コネクタ-アダプタ(475)
- 長方形-基板間コネクタ-ヘッダ、レセプタクル、メスソケット(9)
- 長方形-基板間コネクタ-ヘッダ、オスピン(2)
- 角型コネクタ - ボードスペーサ、スタッカ(基板対基板)(238901)
- 角型コネクタ - アレイ、エッジタイプ、メザニン(基板間)(37853)
- 電源入力コネクタ-インレット、アウトレット、モジュール(10310)
- プラグ可能なコネクタ(6049)
- 太陽光発電 (ソーラーパネル) コネクタ-コンタクト(77)
- 太陽光発電(ソーラーパネル)コネクタ(504)
- モジュラーコネクタ-配線ブロック(99)
- モジュラーコネクタ-プラグ(1674)
- モジュラーコネクタ-プラグハウジング(181)
- モジュラーコネクタ-磁気付きジャック(10152)
- モジュラーコネクタ-ジャック(23416)
- モジュラーコネクタ-アダプタ(855)
- メモリコネクタ-pc カード-アダプタ(21)
- メモリコネクタ-pc カードソケット(3299)
- メモリコネクタ-インラインモジュールソケット(3390)
- lgh コネクタ(764)
- キーストーン-インサート(2758)
- キーストーン-プレート、フレーム(1926)
- ヘビーデューティコネクタ-インサート、モジュール(4190)
- ヘビーデューティコネクタ-ハウジング、フード、ベース(17226)
- ヘビーデューティコネクタ-フレーム(523)
- ヘビーデューティコネクタ-コンタクト(1832)
- ヘビーデューティコネクタ-アセンブリ(671)
- 光ファイバコネクタ-ハウジング(919)
- 光ファイバーコネクタ - アダプタ(4455)
- 光ファイバコネクタ(3001)
- ffc、fpc (フラットフレキシブル) コネクタ-ハウジング(652)
- ffc、fpc (フラットフレキシブル) コネクタ-接点(202)
- FFC、FPC(フラットフレキシブル)コネクタ(18691)
- Dサブ、D字型コネクタ - ターミネーター(47)
- d サブ、d 形コネクタ-ハウジング(12238)
- d-サブ、d 字型コネクタ-接点(2714)
- d-サブ、d 字型コネクタ-バック、フード(5995)
- d-サブ、d 字型コネクタ-アダプタ(1304)
- d-sub コネクタ(141346)
- d 形コネクタ-セントロニクス(8770)
- コンタクト、バネ付圧力(630)
- 連絡先-多目的(6196)
- 接点-リードフレーム(122)
- 同軸コネクタ (rf)-ターミネータ(1231)
- 同軸コネクタ (rf)-接点(480)
- 同軸コネクタ (rf)-アダプタ(6386)
- 同軸コネクタ(RF)(25734)
- 円形コネクタ-ハウジング(441226)
- 円形コネクタ-接点(4737)
- 円形コネクタ-バックおよびケーブルクランプ(53692)
- 円形コネクタ-アダプタ(8839)
- 円形コネクタ(1196254)
- カードエッジコネクタ-ハウジング(469)
- カードエッジコネクタ-Edgeboard コネクタ(672683)
- カードエッジコネクタ-接点(325)
- カードエッジコネクタ-アダプタ(73)
- ブレード式電源コネクタ-ハウジング(837)
- ブレード式電源コネクタ-接点(393)
- ブレードタイプのパワーコネクタ(4163)
- シリーズアダプタ間(649)
- バレル電源コネクタ(935)
- バレルオーディオコネクタ(2432)
- バレルオーディオアダプタ(92)
- バナナとチップコネクタ-ジャック、プラグ(1644)
- バナナとヒントのコネクタ-バインドの投稿(239)
- バナナとチップコネクタ-アダプタ(75)
- バックプレーンコネクタ-専用(45586)
- バックプレーンコネクタ-ハウジング(6863)
- バックプレーンコネクタ-ハードメトリック、標準(6297)
- バックプレーンコネクタ-din 41612(9408)
- バックプレーンコネクタ-接点(3583)
- バックプレーンコネクタ-arinc インサート(2357)
- バックプレーンコネクタ-arinc(3789)
関連メーカー







-
抵抗
-
コンデンサ
-
トランスフォーマー
-
アイソレータ
-
水晶、発振子、共振器
-
スイッチ
スイッチ
- インターロックスイッチ(2893)
- 緊急停止(eストップ)スイッチ(1160)
- ケーブルプルスイッチ(571)
- トグルスイッチ(33608)
- ホイールスイッチ(742)
- 触覚スイッチ(14263)
- スナップアクション, リミットスイッチ(28077)
- スライドスイッチ(5166)
- セレクタスイッチ(9720)
- ロータリースイッチ(13850)
- ロッカースイッチ(53790)
- 押ボタンスイッチ-ホール効果(127)
- 押ボタンスイッチ(190826)
- プログラマブルディスプレイスイッチ(39)
- ナビゲーションスイッチ、ジョイスティック(1882)
- 磁気、リードスイッチ(1399)
- キーパッドスイッチ(637)
- キースイッチ(3684)
- ディップスイッチ(7747)
- 構成可能なスイッチコンポーネント-レンズ(1435)
- 構成可能なスイッチコンポーネント-イルミネーションソース(1236)
- 構成可能なスイッチコンポーネント-コンタクトブロック(1401)
- 構成可能なスイッチコンポーネント-ボディ(16077)
- スイッチコンポーネントの取り外し(2567)
関連メーカー






-
リレー



































言語を選択してください
現在の言語
日本語
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
はしご図を理解する
日付: 03/28/2025
ブラウズ: 2,525
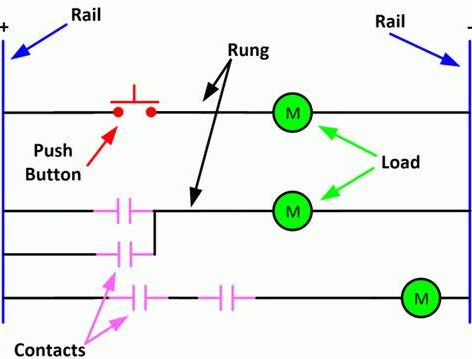
はしご図は、産業用自動化の重要なツールです。彼らは、はしごのステップと側面のように見えるコントロールロジックを単に示すのに役立ちます。これらの図は、光をオンにするか、複雑なマシンを処理するかにかかわらず、物事がどのように機能するかを簡単に理解できます。この記事では、はしご図とは何か、どのように使用されているのか、そして今日の業界でそれほど重要な理由について説明します。
カタログ
図1.はしご図
はしご図の概要
はしご図は、制御ロジックを表すために産業自動化で使用される基本的でありながら有用なツールです。彼らのレイアウトははしごに似ており、2つの垂直線がパワーレール(左側のL1(ライブ)、右側のL2(中立または地面)を表す2つの垂直線があります。水平線、または「ラング」は、スイッチ、リレー、出力デバイスなどの個々の制御操作を表します。
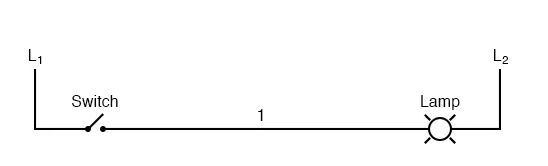
図2。ハンドスイッチで制御されたランプを示すはしご図
はしごの図がどのように機能するかを理解するために、ランプを制御する単純な回路を想像してください。ラングの1つにスイッチが配置され、ランプはL1とL2の間に配線されています。スイッチが閉じたら、電流がL1からスイッチとランプを介して流れ、その後L2に戻り、回路を完成させてランプをオンにします。
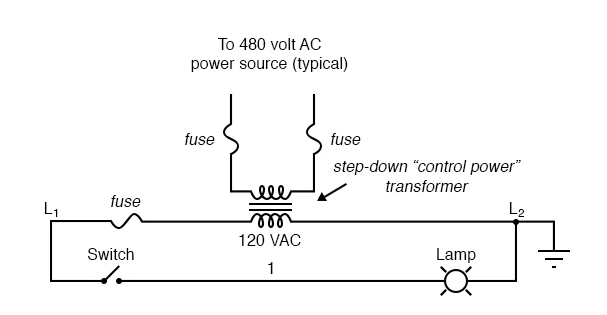
図3。この回路に電力を供給する変圧器または発電機
これらの図では、実際の電源(変圧器や発電機など)は通常省略されています。これにより、電力提供の詳細ではなく、制御ロジックがどのように機能するかに焦点を合わせます。
はしご図は柔軟で、さまざまな電圧レベルで使用できます。多くのシステムでは、120 VACがリレーまたはスイッチを制御するための標準です。ただし、安全性、エネルギー効率、または特定の制御デバイスとの互換性のために、多くの場合、24 VDCなどの低電圧が選択されます。
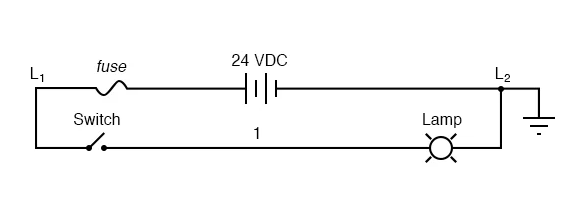
図4。低電圧ACおよびDCシステム
AC電圧またはDC電圧が使用されるかどうかに関係なく、はしご図の基本構造は同じままです。たとえば、24 VDCシステムには、明確に定義された接地パスとともに、過電流から保護するためのヒューズが含まれる場合があります。これらの詳細は、パフォーマンスと安全の両方に注意を払って、実際のシステムの設計方法を反映しています。
適切なコンポーネントの選択は深刻です。図はシンプルに見える場合がありますが、すべての要素(ヒューズ、スイッチの種類、または地面接続など)が目的を保持します。これらの小さな設計上の決定は、実際の操作の実際的な要求を加えて反映しています。ヒューズや切断などの安全機能は、単なる象徴ではありません。それらは、産業環境で取られた実際の保護ステップを反映しています。
回路内のワイヤ番号の重要性
ラダーロジックシステムでは、ワイヤーに数値を割り当てることが大きな慣行です。制御回路をより効率的に構築、テスト、および維持するのに役立ちます。システム内の各ワイヤーは、一意の番号を取得します。たとえば、スイッチからランプまで走るワイヤーは「1」とマークされているため、セットアップまたは修理中に識別してトレースしやすくなります。
これらの数値を産業環境で目に見えるようにし、そのままであることを確認するために、耐久性のある材料を使用してラベルが適用されます。通常、熱を削るスリーブや、振動、温度の変化、一般的な摩耗に耐えることができる工業用グレードの接着タグを使用できます。例として単純な制御パスを取ります:電力線(L1)からスイッチへのワイヤーには、「L1」と「1」の両方でラベル付けされる場合があります。ランプからニュートラル側(L2)に戻るワイヤーは、ラベル「1」と「L2」を運ぶ可能性があります。これらのラベルは、開始点とエンドポイントを識別するだけでなく、現在の移動場所について明確な視覚的な手がかりを与えます。
ワイヤー番号の最も重要なルールの1つは、一貫性です。ワイヤーは、複数の端子を通過したり、さまざまなコンポーネントに接続している場合でも、割り当てられた数値を端から端まで保ちます。より複雑なコントロールパネルでは、「25」というラベルの付いたワイヤーがリレーから始まり、一連の接触ブロックと抵抗器を通過し、タイマーで終了する可能性があります。これらの複数の接続にもかかわらず、ワイヤーは「25」とラベル付けされたままです。
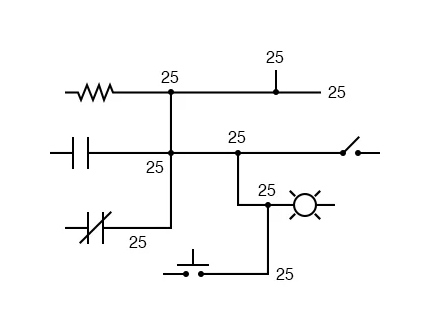
図5。多くの異なるデバイスへの電気的に連続的なポイントスレッド
この一貫したラベル付けは、トラブルシューティングまたはアップグレード中に特に価値があります。パネルを開けて、さまざまなポイントで「25」という番号を表示すると、すぐにそれらがすべて同じ物理ワイヤであることがわかります。これにより、当て推量が削除され、診断がスピードアップされ、エラーの可能性が低下します。また、回路を組み立てるまたは変更するときに接続を文書化および検証しやすくなります。これは、正確さと時間が重要な産業環境でのデザインのタスクです。
はしご図に元素を適切に配置します
はしご図では、各ラングの右側にあるランプ、ソレノイド、またはリレーコイルなど、負荷を配置することが標準的な慣行です。これは電気性能の問題ではなく、明確さ、一貫性、安全性の1つです。電源の接地された側面に対する負荷の位置は、回路が障害にどのように反応するかに直接影響します。
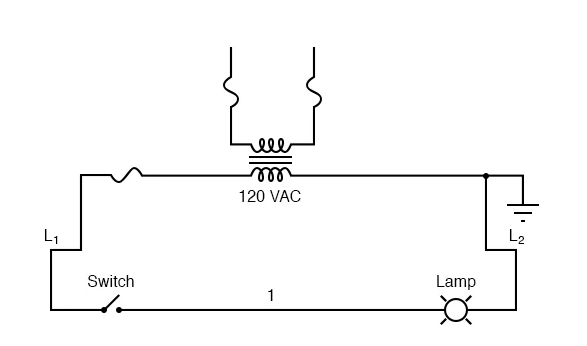
図6。ラダーの電源は接地されています
典型的なセットアップでは、L1は「ホット」またはエネルギー化されたラインであり、L2は接地またはニュートラルなラインです。荷重をL2に近づけます。つまり、図の右に物理的に描かれていることを意味します。障害が発生した場合、応答が予測可能で安全であることを防ぎます。
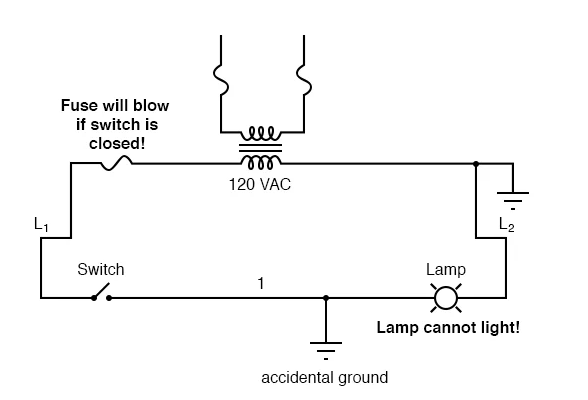
図7。裸の導体が接地された金属の導管と接触しました
たとえば、スイッチとL2の間にランプが配線され、ワイヤ#1(L1からスイッチへのワイヤ)が断熱材の損傷により接地された金属表面に誤って触れている場合、障害経路はスイッチが閉じたときにのみ発生します。それが起こると、突然の急増によりヒューズがすぐに吹き飛ばされ、回路が切断され、損傷や危険が防止されます。
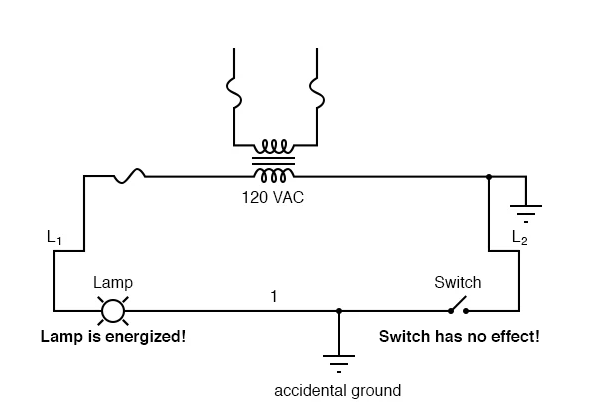
図8。スイッチとヒューズの位置を交換します
ここで、スイッチの後にヒューズが配置され、負荷に近い、あまり理想的ではない構成を想像してください。この場合、ワイヤ#1の地盤断層により、スイッチがオフになった場合でも、ランプがエネルギーを維持することができます。ヒューズは障害の下流であるため、スイッチが閉じない限り、障害電流を検出または中断しません。これにより、回路が外れているが、負荷がまだ生まれている危険な状況が生じます。ショックと火災の危険をもたらします。
供給の接地側の近くに負荷を配置することは、慣習に従うことだけではありません。それは意図的な安全戦略です。地上障害が発生した場合、この構成により、ヒューズがすぐに反応し、障害がエスカレートする前に電力を切断することが保証されます。また、スイッチなどの制御デバイスが機能的なままであり、それらをオフにすることで本当に負荷を無効にすることが保証されます。
はしご図の使用
内部統制および外部デバイス
はしごの図は、内部統制ロジックを表示するのを止めません。また、ポンプ、ヒーター、ファン、モーターなどの外部デバイスも含まれています。これらのコンポーネントは、コントロールパネル内に取り付けられている場合でも、制作フロアに配置されています。これらの要素は、より大きな制御システムでの役割を反映するために図に引き込まれます。これにより、完全な画像を見ることができます。これは、内部コントロールが外部ハードウェアとどのように相互作用するかを確認できます。
最新のPLCプログラミングへのロジックを中継します
もともと、はしご図は、リレーベースの制御システムを表すために開発されました。しかし、テクノロジーが進化するにつれて、その機能も進化しました。今日、Ladder Logicは、プログラマブルロジックコントローラー(PLC)で使用されるコアプログラミング言語です。シンボルとラングを使用して操作を表すために、従来のリレーロジックの視覚構造を保持しますが、現在では物理リレーを配線する代わりにデジタル制御システムをプログラムするために使用されています。
自動化タスク
はしごのロジックは、モーターのオンとオフをオンにするなど、基本的なマシン関数から複雑なマルチステージの自動化プロセスまで、あらゆるもので使用されます。シンプルなコンベアを制御するか、タイミング、インターロック、安全システムを大規模な施設で調整するかにかかわらず、はしご図は、制御シーケンスを設計およびプログラムする明確で構造化された方法を提供します。
ハードウェアとソフトウェア
はしごの図を特に価値のあるものにしているのは、自動化の物理的およびデジタルな側面をどのようにリンクするかです。おなじみのロジックを使用してPLCをプログラムする方法を提供し、システムの仕組みを視覚化しやすくします。この視覚的アプローチは、チーム間のコミュニケーションを改善し、トラブルシューティングに役立ち、プログラミングのバックグラウンドを持たない人にとってトレーニングをよりアクセスしやすくします。
はしご図を使用することの利点
理解しやすい
はしご図は、読みやすく解釈しやすいため、広く使用されています。それらの構造は、物理的な電気回路に似ているように見えます。これは、システムの仕組み、特に配線や電気メンテナンスの実践的な体験をしている人たちを迅速に把握するのに役立ちます。プログラミングの正式なトレーニングがなくても、シンボルを認識し、図を左に流れる方法を理解することだけでロジックに従うことができます。
オンザジョブのトラブルシューティングとメンテナンス
多くの産業環境では、日々のトラブルシューティングとシステムチェックが処理されません。はしご図はこれを可能にします。ラング、コンタクト、コイルを基本的に理解している場合、障害をすばやく追跡できます。システムが何をすべきかを簡単に理解し、問題を見つけることができます。これにより、ダウンタイムが削減され、専門の担当者がシステムを解釈するのを待っています。
制御ロジックの明確な表現
はしごの図は、単純な外観にもかかわらず、複雑なロジックを処理できます。それらは、タイマー、カウンター、インターロック、安全チェックなどの条件を表すことができます。これらはすべて、組織化されたままの視覚的な形式であり、従うのが簡単です。これにより、システムがどのように動作するかを文書化し、その動作をプログラム可能なロジックコントローラー(PLC)に直接実装することの両方に理想的です。
スキルレベル全体の効果的なコミュニケーション
はしご図の最も価値のある機能の1つは、施設内の異なる役割の間に共有言語を作成することです。すべて同じ図を参照して、マシンまたはプロセスがどのように機能するかを理解できます。これにより、コラボレーションが改善され、新しいスタッフのトレーニング、システムの更新、またはシフト間のメンテナンスタスクの引き渡しが容易になります。
計画と運用の両方に信頼できます
はしご図は、制御意図と物理レイアウトの両方を示すため、システムライフサイクル全体で役立ちます。計画とインストール中に、すべてが正しく配線およびプログラムされていることを確認するのに役立ちます。その後、操作中に、問題を診断したり変更を加えたりするための頼りになる参照として機能します。透明度、アクセシビリティ、機能的な深さの組み合わせにより、はしご図は、ほぼすべての産業用自動化設定で信頼できるツールになります。
PLCプログラミングに一般的に使用されるはしご図
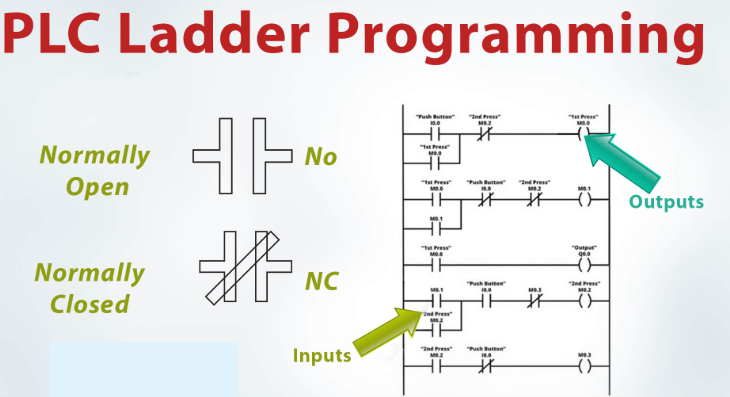
図9。PLCプログラミングに使用されるはしご図
簡単に移行するための馴染みのある形式
ラダーロジックは、従来のリレーコントロールサーキットのレイアウトに非常に似ているため、プログラマブルロジックコントローラー(PLC)のプログラミング言語として選択されることがよくあります。Hardwired Systemsで作業したあなたにとって、この視覚形式はおなじみのように感じます。彼らは、完全に新しいスタイルのプログラミングを学ぶ必要なく、コントロールシーケンスがどのように機能するかをすぐに理解できます。
ハードウェアからソフトウェアへのスムーズなシフト
実際には、多くの施設が物理的なリレーベースのシステムからPLCに移動しています。ラダーロジックを使用すると、同じ運用的思考を反映するため、その移行が容易になります。これは、ソフトウェアを介して適用されるようになりました。かつて物理的な配線と機械的リレーを必要としたものは、同じ論理フローに従って画面上で構成できるようになりました。
幅広い制御タスクをサポートします
はしごロジックは、単純なオン/オフコマンドに限定されません。パルスのカウント、時間の遅延の測定、段階的なシーケンスの実行など、より高度な操作を処理できます。基本的な数学操作を実行することもできます。この柔軟性により、単純な機械から複雑なマルチステージの自動化プロセスまで、すべてをサポートできます。
はしご図を読む
はしご論理の基本を理解する
はしごの図を読むことは、それがバイナリロジックを中心に構築されていることを認識することから始まります。すべてのものが真またはfalse、1または0のいずれかです。図の各ラングは、満たされた場合、光をオンにしたり、モーターを起動したり、バルブを開いたりするようなアクションにつながるコントロール条件を示します。このバイナリアプローチは、自動システムで実際の機器がどのように動作するかを反映しています。
デバイスを反映するシンボル
はしご図は、特定のシンボルを使用して物理的なコンポーネントを表します。たとえば、通常開いている(NO)連絡先は、押されたときに回路を完成させるプッシュボタンのようなものを表します。通常閉じた(NC)連絡先は反対のことを行います。これにより、アクションが開くまで電流が流れるようになります。これらのシンボルは、論理操作を表す水平ラングに配置されます。通常、各ラングは、スイッチやセンサーなど、左側の1つ以上の入力条件で始まり、リレーコイルやランプなどの右側の出力デバイスで終わります。
ロジックの流れに続いて
はしごの図の論理は、左から右に、上部に流れます。各ラングを一連の指示の文と考えることができます。たとえば、ラングが言うかもしれません:ボタンが押され、センサーがオブジェクトを検出した場合、モーターをオンにします。図を下に移動すると、各ラングがシステム全体の動作に貢献する別のルールまたは条件を追加します。
はしご図をオンラインで作成します
ステップ1:コア構造を理解します
はしご図をオンラインで作成する前に、はしごの論理がどのように編成されているかを知ることが重要です。はしご図には、電源を表す2つの垂直線(コールレール)があります。左のレールは通常、正の(または「ホット」)側に接続し、右のレールはニュートラルまたは負の側に接続します。これらのレールの間では、水平線(コールされたラング)が個々の制御回路を表します。各ラングは、システム内の特定の条件またはアクションを示します。
ステップ2:入力と出力を識別します
入力 プッシュボタン、制限スイッチ、またはセンサーなどのデバイスです。これらは、環境のユーザーアクションまたは物理的変化を検出するコンポーネントです。図では、通常、ラングの左側に向かって表示されます。
出力 これらの入力に応答するデバイスです。これらは、モーター、ランプ、ブザー、またはソレノイドです。それらはラングの右側に向かって示され、入力条件が満たされるとアクティブになります。
ステップ3:論理条件を構築します
各ラングは、出力がオンになったときに制御する論理ルールを表します。たとえば、2つの通常開いた連絡先が直列に配置されている場合、出力をオンにするには両方ともアクティブ化(または「真」)する必要があります。それらが並行している場合、どちらかをアクティブにすると、出力がエネルギーを与えます。このセットアップにより、実際の運用ニーズを反映するカスタムコントロール動作を設計することができます。
ステップ4:アドレスタグと表記を使用します
図を実際のPLCまたはシミュレーション環境に接続するには、各シンボルにアドレスタグを割り当てる必要があります。これらのタグは、図の入力と出力をPLCの実際のメモリ位置またはI/O端子にリンクします。たとえば、ボタンには「i:1.0」とラベル付けされて、モジュール1の最初の入力であることを示すことができ、モーターはモジュール2の出力の「O:2.1」とラベル付けされる場合があります。
ステップ5:オンラインツールを使用して、構築およびシミュレートします
最新のオンラインラダーロジックプラットフォームは、ドラッグアンドドロップインターフェイスを提供しているため、コードを作成せずに図を簡単に作成できます。数回クリックして、入力、出力、タイマー、その他のコンポーネントをラングに配置できます。ほとんどのツールにはシミュレーション機能も含まれているため、実際のハードウェアに展開する前に、図の動作方法をテストできます。これは、ミスを早期に特定し、実際の実装前にデザインを改善するのに特に役立ちます。
ステップ6:テスト、調整、展開
ロジックが完了したら、シミュレーションを使用して、さまざまな操作シナリオを進めます。入力をトリガーし、出力がどのように応答するかを視聴してみてください。ロジックが予想どおりに動作しない場合は、簡単に戻り、ラングを調整し、再テストします。すべてが正しく機能すると、最終図をプラットフォームに応じてエクスポートまたはPLCに直接アップロードできます。
結論
はしごの図を見ると、理解しやすく、信頼性が高く、柔軟性があるため、産業の自動化にとって非常に重要であることは明らかです。これらの図は、制御システムの設計と修正に役立ち、それらをより安全で効率的にします。実際の機器をデジタルコントロールに接続し、はしご図をプログラマブルロジックコントローラー(PLC)プログラミングに役立て、さまざまな業界で物事をスムーズに実行し続けます。はしご図の使用方法を知ることは、自動化されたシステムを操作するのに役立ちます。
よくある質問[FAQ]
1.はしご図には何が含まれていますか?
はしご図は、主に制御ロジックで電気回路がどのように機能するかを示すために使用される概略図です。これは、電源を表す2つの垂直線(多くの場合、レールとして描かれている)で構成され、これらのレール間の水平線は、スイッチ、リレー、タイマー、モーターなどの回路内の異なるコンポーネントを象徴しています。はしごの各ラングは、回路内の明確な制御要素または動作を表し、制御操作の簡単な解釈を可能にします。
2。はしごと概略図の目的は何ですか?
はしご図は、主に電気制御システムの理解とトラブルシューティングを簡素化するために使用されます。それらは、電気配線を密接に模倣する視覚的表現を提供します。これは簡単に従うことができます。一方、概略図は、統合回路や複雑な電子機器を含むすべてのコンポーネント間の詳細な接続を提供し、システム全体のより深い理解を促進し、設計と分析の段階を支援します。
3.はしご図の欠点は何ですか?
はしごの図は、リレーやタイマーを含む単純な制御ロジックに優れていますが、より複雑なシステムには制限があります。大規模なシステムやアナログ操作などの高度な関数を扱う場合、面倒で直感的ではなくなります。これらは、関数ブロックやシーケンシャル関数チャートなどの他の形式の図でよりよく表現されます。
4.はしごを使用する際の最大の間違いは何ですか?
はしご図を使用することの最大の間違いの1つは、過剰な複雑さです。単一のラング上の条件やコンポーネントが多すぎることです。これにより、図の読み取りとトラブルシューティングが困難になります。はしごの論理をシンプルに保つために使用され、各ラングが明確で単一の運用目的を持つようにします。
5.ラダーロジックがまだ使用されているのはなぜですか?
その制限にもかかわらず、はしごの論理は、その単純さと物理的なリレー配線に似ているため、広く使用されています。この形式に慣れることができ、大規模な再訓練なしに既存のシステムを維持および変更しやすくすることができます。プログラミングPLC(プログラマブルロジックコントローラー)での標準化された外観と使いやすさも、産業自動化における永続的な人気に貢献しています。
関連記事
-
![トータルハーモニック歪み(THD):それが何であるか、それを計算する方法、そしてそれを測定する方法は?]() Mar 30 2025トータルハーモニック歪み(THD):それが何であるか、それを計算する方法、そしてそれを測定する方法は?
Mar 30 2025トータルハーモニック歪み(THD):それが何であるか、それを計算する方法、そしてそれを測定する方法は?総高調波歪み(THD)は、異なる電子システムと電気システムを設計およびチェックする際の重要な要素です。スピーカーや音楽機器から繊細な電子機器まで、THDを知... -
![コンピューターRAMタイプの比較]() Mar 28 2025コンピューターRAMタイプの比較
Mar 28 2025コンピューターRAMタイプの比較コンピューターメモリは、デバイスがどれだけ速くスムーズに実行されるかに大きな役割を果たします。DRAM、SDRAM、およびDDRは、コンピューター、電話、サーバー...


関連製品
2225SA332JAT1A
CAP CER 3300PF 1.5KV NP0 2225

ICM7228AIBIZ
IC DRVR 7 SEGMNT 8 DIGIT 28SOIC

VI-910878
IGBT Modules

MAX662AESA
FLASH MEMORY PROGRAMMING SUPPLY

S9S08DN16CLC
S9S08DN16CLC FREESCALE

AT49F020-90JI
AT49F020-90JI ATMEL

LT1239CS#PTR
LT1239CS#PTR LT

T491D476M016AT24787280
CAP TANT 47UF 20% 16V 2917
S9S12G64MLF
S9S12G64MLF FREESCALE

XAM3359BZCZ IC
TI BGA
HD6433643RE27HV
Hitachi QFP
LC1809B-T
LEADCORE BGA
TPS26631PWP
TI 2017+RoHS